Opnemen camera
Er zijn twee manieren om op de Amiga robot een opname te starten:
- Door middel van de gigantische “record” knop in de Camera app.
- Door middel van het kleine “record” knopje linksboven op het dashboard.
Een ‘opname’ neemt alles op van de services die geselecteerd staan in de instellingen.
Opnames zijn terug te vinden in de File Manager app. De bestanden staan intern opgeslagen in /mnt/data/.
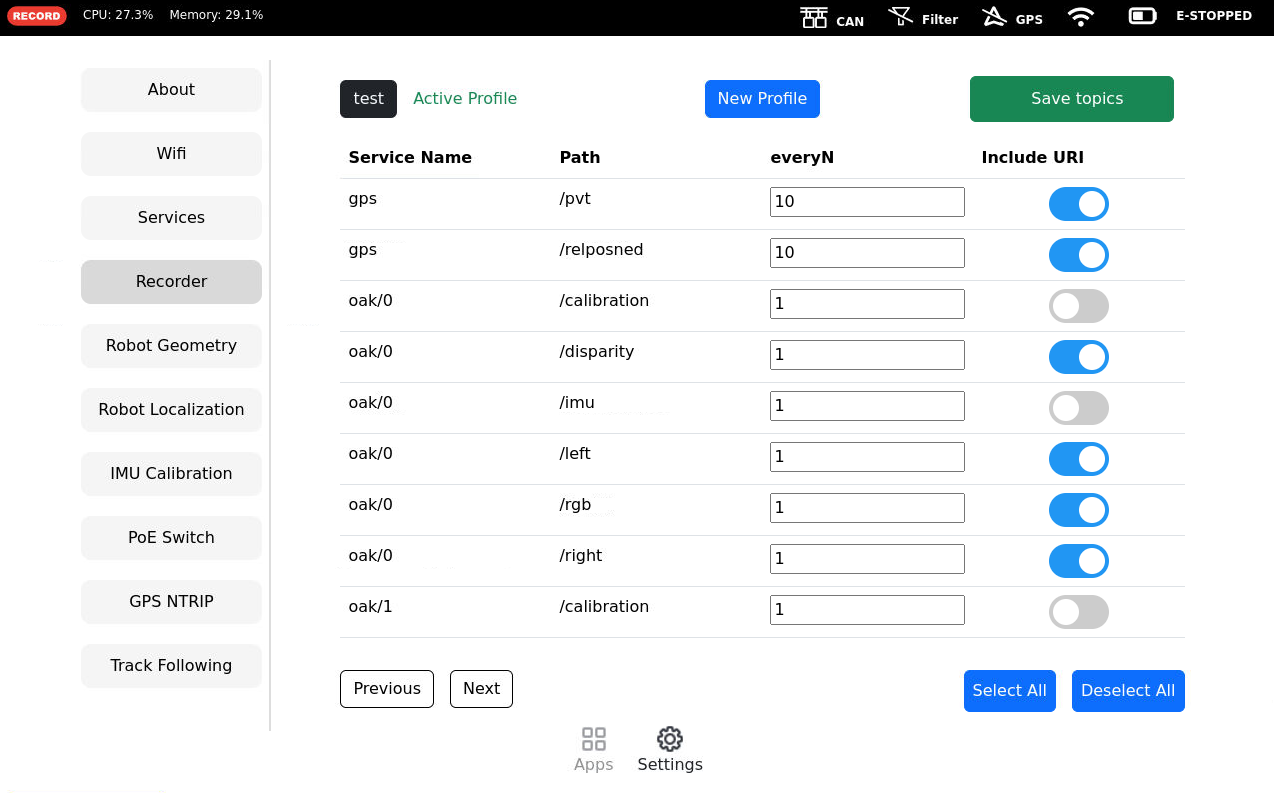
Het aanzetten van de juiste services
In de instellingen op het dashboard kan je wijzigen welke data opgenomen wordt en in een enkel .bin bestand geplaatst wordt.
De camera’s heten oak0 tot oak3. Hier een overzicht van de standaardopstelling:
| Camera | Positie |
|---|---|
| oak0 | Voor |
| oak1 | Achter |
| oak2 | Onder |
| oak3 | Onder |
Het is in deze instellingen mogelijk om met profielen te werken. Zo kan je makkelijk tussen verschillende opname configuraties wisselen. Hiervoor heb je bovenaan een knop. Zorg ervoor dat je je profiel een duidelijke naam geeft, en pas nooit zonder overleg iemands profiel aan.
Het ophalen van de bestanden
Met een USB-stick (lokaal)
Echte IT-ers hebben te allen tijde een USB-stickje op zak, en dat komt nu goed van pas! Op de achterkant van het scherm zit namelijk een USB-poort die je kan gebruiken om alle opgenomen services op te halen.
Je USB-stick moet aan de volgende vereisten doen:X
- Het format van
ext4orexFATvoor deze app is vereist. - Je USB-drives bevat niet meerdere partitites.
- Je stopt de USB-stick in de robot na het opstarten van de robot & de app.
Linksboven kan je de USB-stick status zien (bij afwezigheid “Error loading USB”):
Met FileZilla (SFTP)
Voor instructies over het verbinden met SFTP verwijs ik naar het artikel over het verbinden met de robot.
- Open FileZilla en verbind met de robot.
- Navigeer naar
/mnt/data/. - Download de gewenste
.binbestanden.
Het parsen van de .bin bestanden
Waarschijnlijk wil je in plaats van de .bin bestanden gewoon de camera data zien als afbeeldingen of video! Hiervoor heb ik een applicatie gemaakt die hier te vinden is. In de README staan duidelijke instructies.
Om het te gebruiken kan je het volgende format gebruiken:
python3 main.py <component> <args>Dus voor het parsen van alle camera’s + .MPO bestanden genereren:
python3 main.py camera -f "/home/user/Downloads/test_bin.bin" -o "/home/user/Downloads/output/" --mpo